AR 导航应用 —— AR 图书馆导航

效果演示
搜索书籍
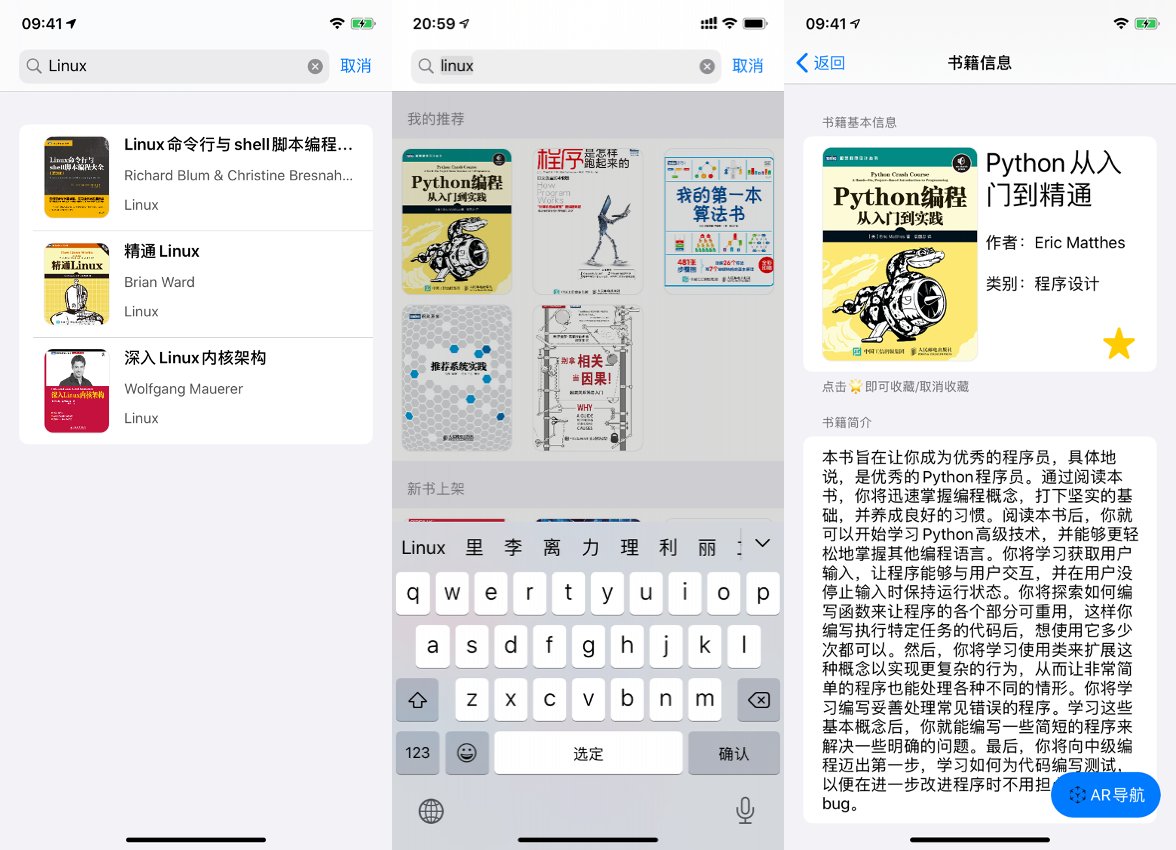
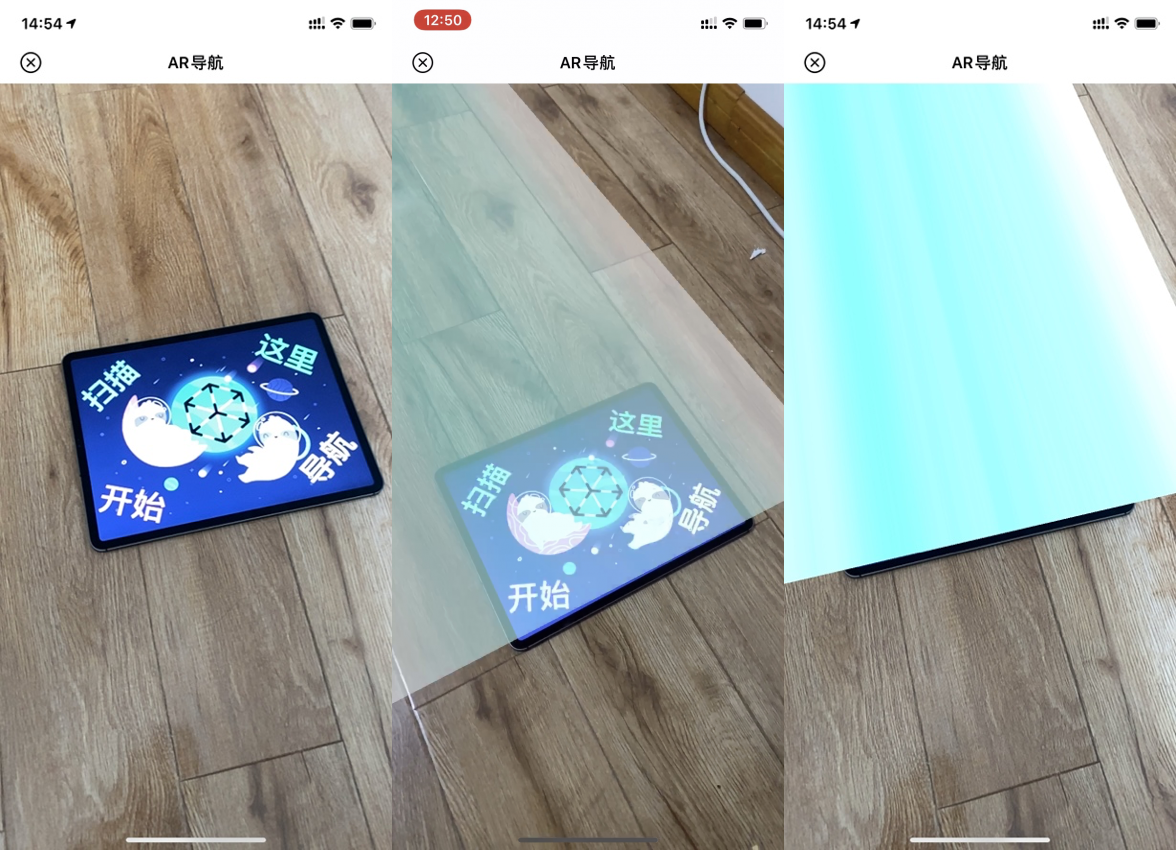
AR导航确定初始位置
AR导航
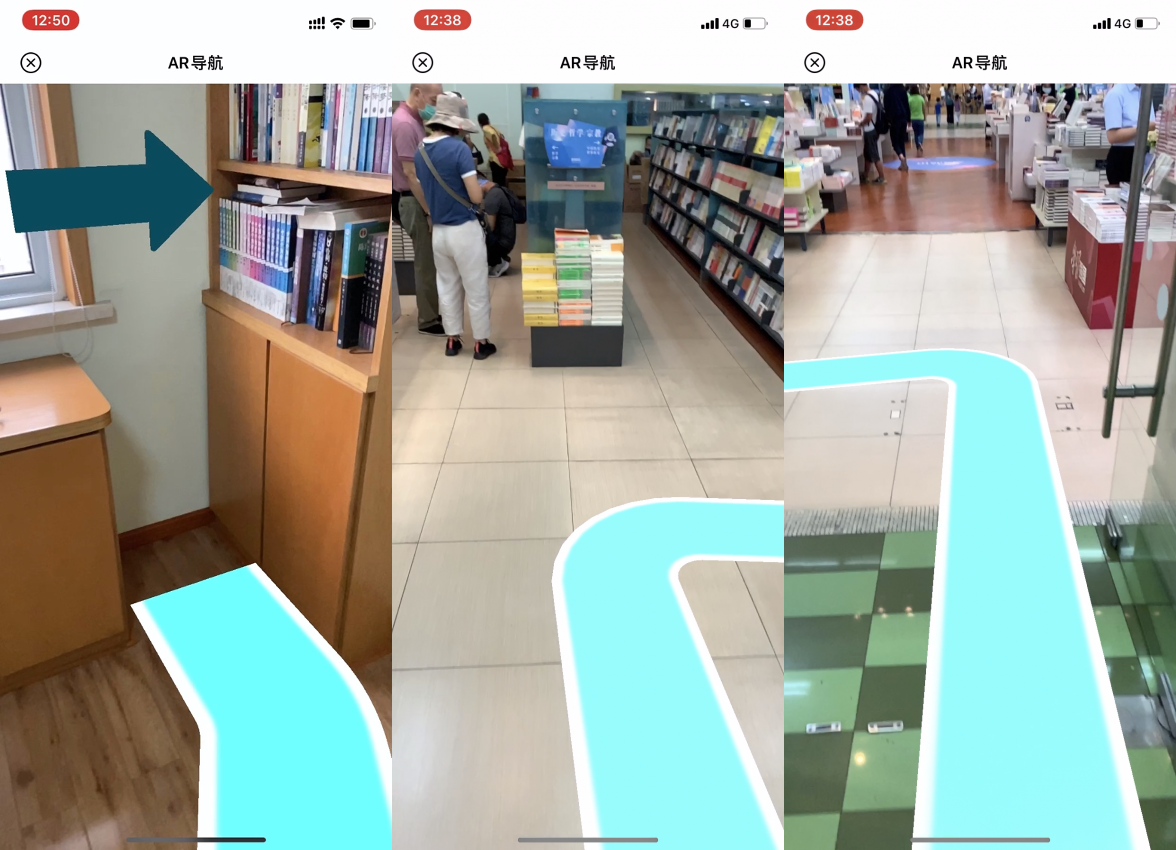
到终点识别图书封面

演示视频
创新点
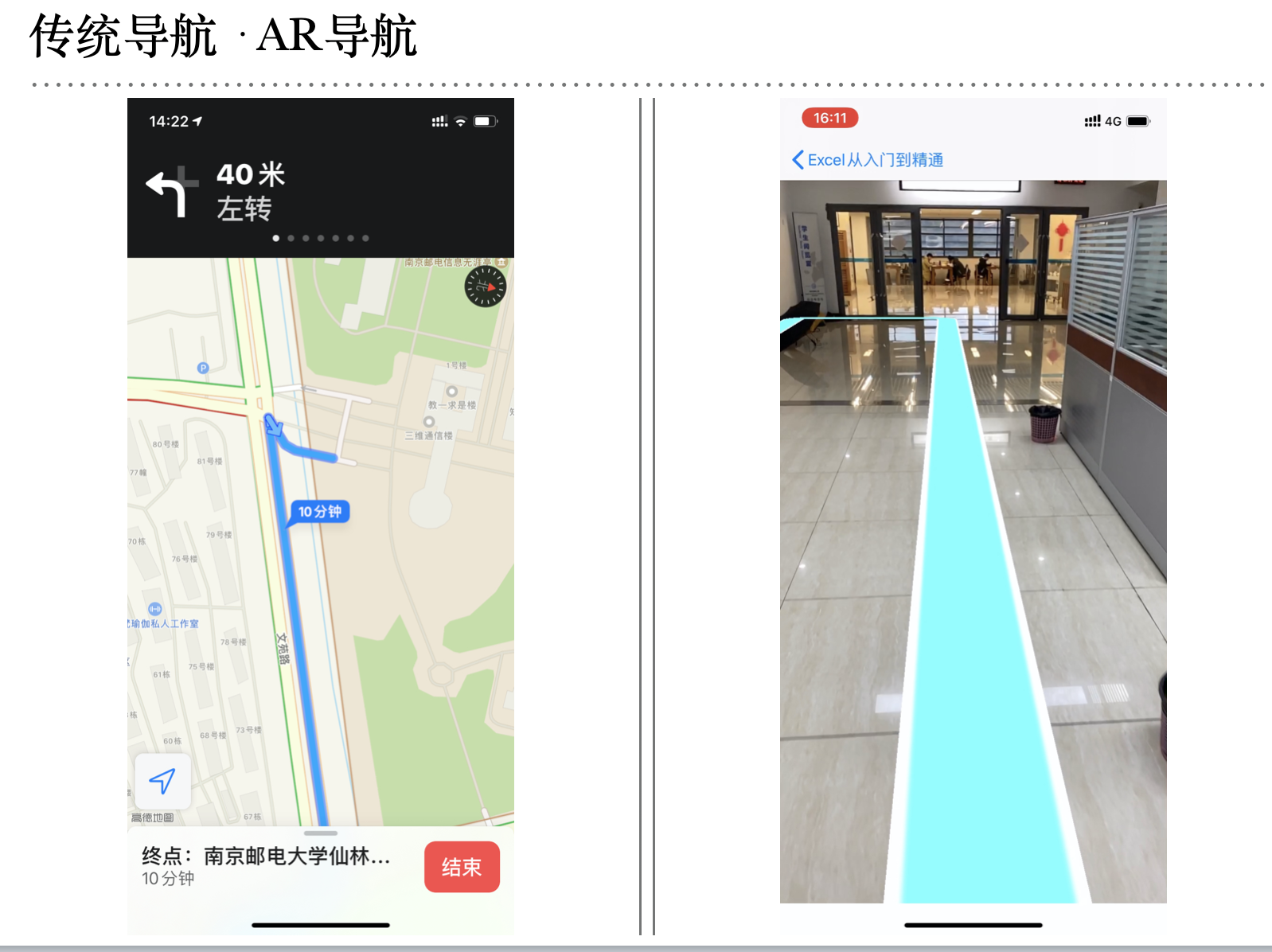
相比传统导航的创新
传统的导航,采用二维平面显示路径以及所在位置的居多。而本项目的创新之处在于运用增强现实技术,通过手机的摄像头,将虚拟的导航规划路线,放置在手机的屏幕上,实现虚拟与现实巧妙结合,提升了在室内导航的可视化效果、引导的直观性大大提升,具有良好的可交互性,提升了用户体验。
广阔应用前景
除高校图书馆之外,该项目的应用场景也非常丰富,例如城市图书馆、博物馆等,还可用于提供生活服务,例如大型购物商场的导航、机场航站楼的指引、以及大型地下停车库等等,采用系统化的构建方法,即可快速增加对新场景的应用支持。因此该项目的具有十分广阔的应用前景。
本文由作者按照 CC BY 4.0 进行授权